Intelligent system for autonomous control in robotics cooperation
Knowhow and Research output
Over the last decade, there has been a strong scientific and industrial concern in robotic cooperation. From problems of surveillance in industrial, commercial or domestic environments, or rescue and help in catastrophic areas, till problems of efficient package delivery in companies like Amazon or DHL, require mathematical optimization algorithms that solve these problems optimally and efficiently through the deployment of cooperative robot teams.
The cooperatTive ExploRation Routing Algorithm (TERRA) is a planning system that, using artificial intelligence techniques, allows a team of robots to combine their capabilities to complete more complex tasks. For this, TERRA implements a novel robotic cooperation paradigm that offers a solution to the problems mentioned in the previous paragraph. This exploration paradigm uses a ground vehicle to reach terrestrial targets and, a drone team to reach the aerial targets.
Unlike other route planners, TERRA coordinates and plans efficient routes that meet the objectives set in the shortest time with the greatest cost savings.
The cooperaTive ExploRation Routing Algorithm (TERRA) is a planning system that implements a paradigm for a novel cooperation between a team of heterogeneous robots, such as Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs), to carry out a large-scale exploration with a high level of autonomy. A large-scale exploration involves performing a set of tasks in different locations distributed in a certain large area (km).
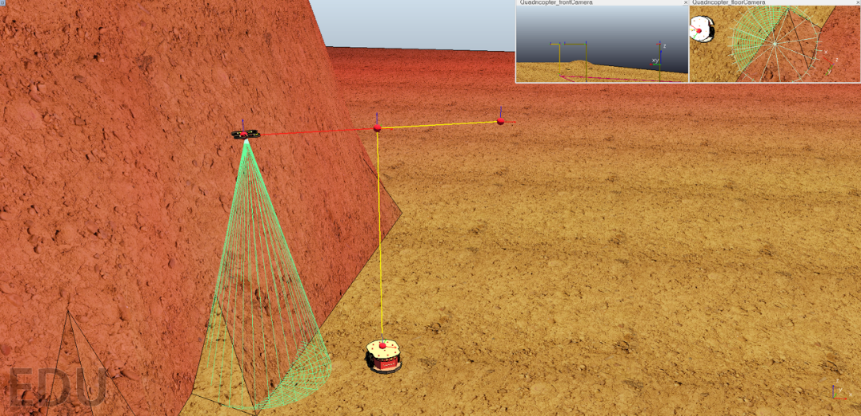
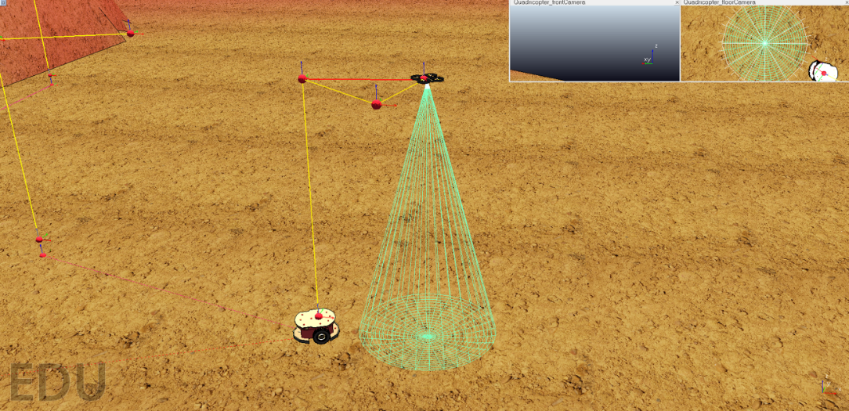
The paradigm implemented by TERRA represents the cooperation and coordination synergies between the team of robots, that is, the interactions among the robots to carry out the designated tasks. TERRA defines the UGV as a moving charging station that transports one or several UAVs to certain secure locations from which the UAVs can access the target tasks. In this way, the UGV makes available to the UAV its transport capacity and mobility on different terrains, so that the UAV can reach the objective aerial tasks. Also, the UAV can use the UGV as a charging station to recharge its battery and continue the exploration. In this way, both robotic systems put at the disposal of the team their capabilities to achieve more complex tasks.
TERRA is a route planner that develops a five-stage strategy to design a cooperative route to a specific exploration scenario. An exploration scenario is defined by a set of objectives distributed over any area. For example, ten Amazon customers who bought a product, and Amazon must make the delivery of these products on the same day. Another example, an industrial zone that needs to be monitored by several critical access points throughout the night. Another, a catastrophic area in which several people have been trapped and medical services will take several days to find their way to them, and so, they need resources to survive.
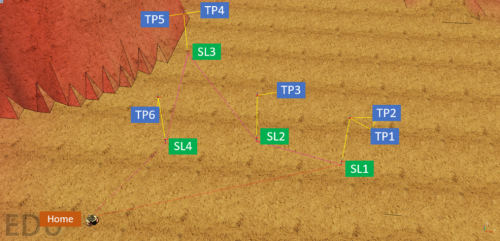
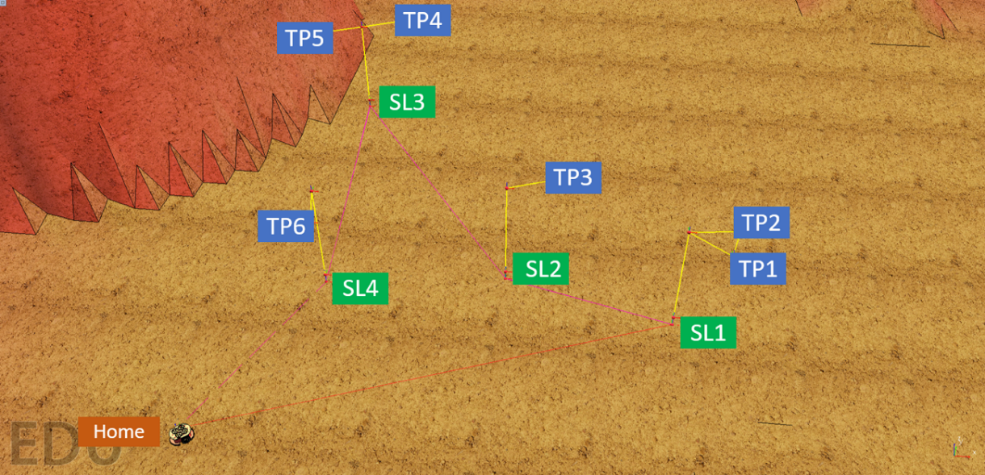
The first stage of TERRA is to find the safe areas from which the UAVs can access the objectives (Amazon clients, critical surveillance points or isolated people for the rescue). For this, TERRA implements computational geometry algorithms to systematically find the best locations that allow access to every objective. In this way, it is guaranteed that our system is capable of reaching all the objectives.
The second stage focuses on optimizing the number of safe areas chosen in the previous stage, guaranteeing the total coverage of the objectives. The objective of this stage is to minimize the number of safe areas, which will minimize the travel distance of our team of robots, and with it, the total time of the mission. For this, TERRA implements set optimization algorithms that find an optimal solution to this problem.
The third stage consists of finding the optimal two-dimensional route for the UGV, along all the previously selected safe areas. The objective of this stage is to minimize the distance traveled between the safe zones, and so, minimize the total time of the mission. TERRA implements a specialized genetic algorithm to solve the discrete optimization problem known as the Traveling Salesman Problem.
The fourth stage aims to compute the three-dimensional route for the UGV. For this, TERRA implements an artificial intelligence algorithm specifically developed by us to find the route in three dimensions with the lowest energy expenditure for the UGV. This is accomplished by considering factors in the search such as, the terrain slope or different obstacles.
The fifth and last stage consists of computing the route in three dimensions for the UAV. This route comprises the UGV in a safe area, reaching all the objectives linked to that safe area, until the return to the UGV to continue the exploration in another safe area. In this stage, TERRA implements a search algorithm specifically designed to find the fastest and most efficient route for the UAV.
Finally, the five-stage strategy carried out by TERRA allows it to be a highly scalable, robust and efficient system, in addition to being able to focus on the optimization of various resources within the mission, such as energy and time.
ADVANTAGES AND INNOVATIONS:
KEYWORDS:
Automation, Robotics Control Systems, Artificial Intelligence (AI), Intelligent control, path planning and mission optimization.
Current development status
Finished technologies
The Technology Transfer Office at Alcalá University serves as a liaison between the University and its socioeconomic environment in terms of research and innovation. It encorages collaboration between research groups from universities and companies/institutions, with the objective to promote and commercialize research results and scientific capabilities.
Some of the services offered by this office are specified in the following list:
- Promotion of R & D and improvement of the relationships with companies.
- Promote the participation in R & D projects applicants to public calls (regional, national and European).
- Advising, processing and monitoring of patents and other forms of industrial protection.
- Support in the negotiation of contracts and agreements for R&D&i
Create your free account to connect with Universidad de Alcalá-OTRI and thousands of other innovative organizations and professionals worldwide
Send a request for information
to Universidad de Alcalá-OTRI
Technology Offers on Innoget are directly posted
and managed by its members as well as evaluation of requests for information. Innoget is the trusted open innovation and science network aimed at directly connect industry needs with professionals online.
Need help requesting additional information or have questions regarding this Technology Offer?
Contact Innoget support

