Mapping & localization without LIDAR: A robust camera SLAM solution
Innovative Products and Technologies
Background
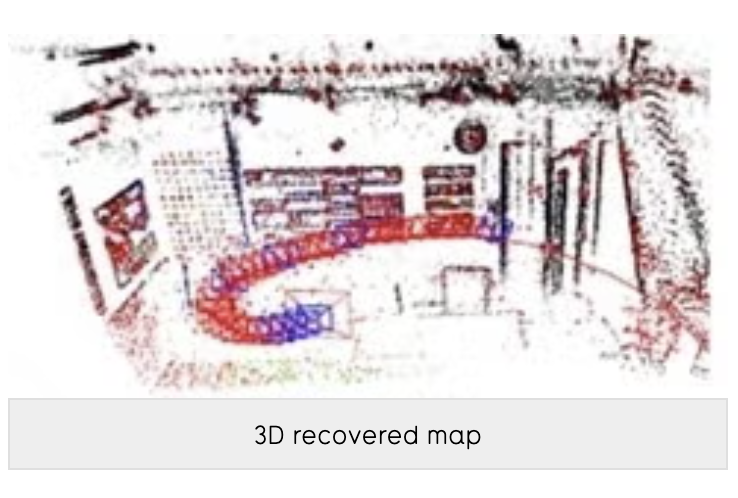
Visual odometry is the ability to localize with only a camera while moving. Simultaneous Localization and Mapping (SLAM) extends this to also mapping the world simultaneously. The result is a mapping and localization method that produces LIDAR like results with only an inexpensive camera. Direct methods use pixel values while indirect methods use detected visual features. Hybrid methods leverage the advantages of Direct and Indirect Video Odometry. However, hybrid methods in general require complicated systems with a relatively high computational requirements limiting their real-time performance. These methods also cannot perform well in texture-deprived environments, may not provide a consistent performance, and may require a separate process to build and maintain several different map representations.
Description of the invention
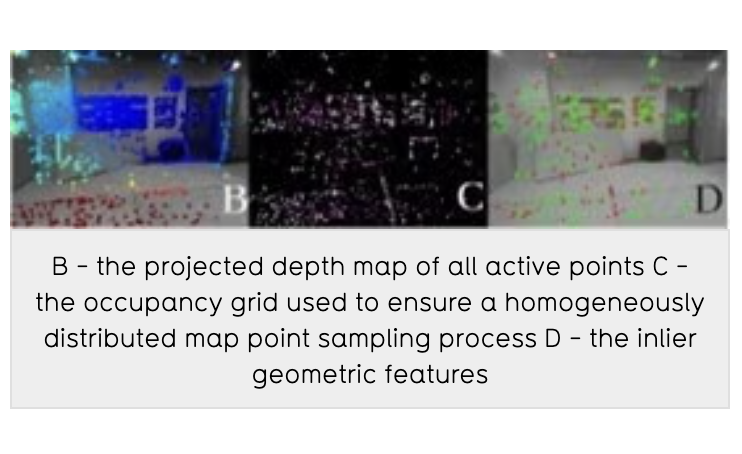
Researchers at the University of Waterloo have developed a hybrid Visual SLAM method that tightly integrates existing direct and indirect methods to capitalize on each one’s advantages to address the above-mentioned limitations. Waterloo’s Visual SLAM provides direct advantages such as sub-pixel accuracy, inexpensive computational costs, robust under texture deprivation and provides a sparse and semi-dense reconstruction density. Further the method also provides indirect advantages such as being robust to large distances between views, less sensitive to optimization seeds, and robust to lighting changes. These combined advantages provide a global map query capability that supports map re-use. The method provides state-of-the-art low error performance: in visual odometry, this Visual SLAM method outperforms all hybrid, direct & indirect methods’ while in full SLAM after loop closure, the accumulated error is essentially zero.
Advantages
Potential applications
The University of Waterloo, renowned for its innovative spirit and co-op education model, excels in cutting-edge research across diverse fields, including advanced manufacturing, artificial intelligence, sustainability, and health technologies.
Create your free account to connect with University of Waterloo and thousands of other innovative organizations and professionals worldwide
Send a request for information
to University of Waterloo
Technology Offers on Innoget are directly posted
and managed by its members as well as evaluation of requests for information. Innoget is the trusted open innovation and science network aimed at directly connect industry needs with professionals online.
Need help requesting additional information or have questions regarding this Technology Offer?
Contact Innoget support