Non-contact remote force measurement system for minimally invasive surgeries and cell manipulation applications
Innovative Products and Technologies
The MagLev Micro-robotic Lab at the University of Waterloo has developed a novel force measurement method which can provide haptic feedback to the surgeon without the need of attaching any force sensors to the end-effector of a surgical device operated by the magnetic-based propulsion system. More specifically, this remote robotic navigation technology enables minimally-invasive surgeries with the precise ability to steer and control catheters, needles, guide-wires, radioactive seed implants or other surgical tools. This technology measures the magnetic flux produced for the propulsion and precisely calculates the environmental force applied to the surgical end-effector.
Background
A number of minimally invasive surgical procedures rely on different types of catheters to deliver treatment to hard-to-reach human internal organs. Magnetic-based propulsion technologies have recently been used with such catheters to assist with high precision manipulation tasks in these surgeries. However; the precision and effectiveness of these surgeries relies to a great degree on providing visual feedback to the surgeon about the location of the catheter end-effector at all times. Surgeon’s experience thus plays an important role in interpreting the visual feedback and then applying the required force on the catheter to navigate the device or to engage in performing the actual surgical procedure. However, incorporating force-feedback capabilities into such magnetic-based surgical platforms would provide an excellent opportunity to improve the quality of surgical procedures.
Advantages
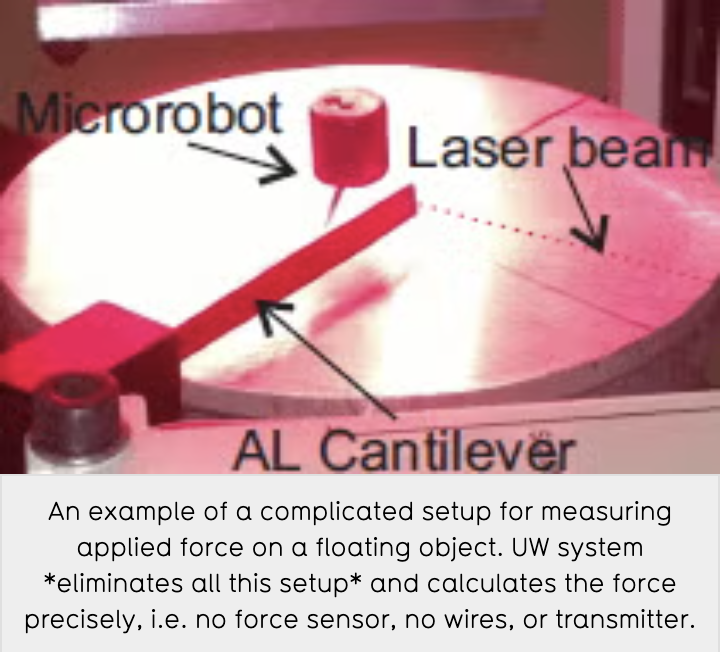
Traditional force measurement methods use micro-force sensors attached to the end-effector, which are very sensitive to the physical parameters of the environment. However, the new method performance is not dependent on environmental parameters such as temperature and humidity. Furthermore, the UW technology does not require changes to the configuration of existing magnetic-based surgical navigation tools where as competitive force sensing technique would require surgical equipment modifications.
Potential applications
The University of Waterloo, renowned for its innovative spirit and co-op education model, excels in cutting-edge research across diverse fields, including advanced manufacturing, artificial intelligence, sustainability, and health technologies.
Create your free account to connect with University of Waterloo and thousands of other innovative organizations and professionals worldwide
Send a request for information
to University of Waterloo
Technology Offers on Innoget are directly posted
and managed by its members as well as evaluation of requests for information. Innoget is the trusted open innovation and science network aimed at directly connect industry needs with professionals online.
Need help requesting additional information or have questions regarding this Technology Offer?
Contact Innoget support